Antreiben
Regeln
Positionieren
☰
Produkte
Produktübersicht
Softwarelösungen
Cloudbasiertes Analyse- und Fernwartungstool
Servomotoren
AC-Servomotoren
DC-Servomotoren
EX / ATEX Motoren
BL-Servomotor + Motion Controller
DC-Servomotoren
BL-Servomotoren bis 35 Nm der Serie EX
BL-Servomotoren bis 41 Nm der Serie EY
Servoregler
Digitale Servoregler
Analoge Servoregler
Analoge Lineare Servoregler
Dezentrale Servoantriebe
Zwuckel 48V/0,7Nm
"Huckepack"-Anbauregler
Parker Motornet Einkabellösung
Lineareinheiten + Hubzylinder
Elektrohubzylinder der Serie ETH
Linearaktuator der Serie HLR
Linearaktuator der Serie ETT
Servoaktuator der Serie MISG / MISO
Lineareinheiten der Serie ECO 60, 80, 100
Lineareinheiten der Serie ELM 50, 65, 80, 110
Lineareinheiten "low cost and entry level" der Serie LIGHT 30, 50, 80
Lineareinheit für Reinraum der Serie ONE 50, 80, 110
Lineareinheiten für große Masse der Serie ROBOT 100, 130, 160, 220
Lineareinheiten für Vertikalachsen der Serie SC 65 (100), 130, 160
Lineartische der Serie TT 100, 155, 225, 325
Lineareinheiten für hohes Trägheitsmoment der Serie VR 140
Asynchronmotoren
Frequenzumrichter
Serie AC10
Serie AC30
SPS /Steuerungen
Parker PAC
Getriebe
Planetengetriebe
Stirnradgetriebe
Servotechnik /Automatisierungstechnik Zubehör
Bremsen
Drosseln
Optische Impulsgeber
Potentiometer
Steckkartenhalter
Tachos
Transformatoren
Zusatzelektronik
Kabelprüfmaschinen
Kabelprüfmaschine für 1 - 5 Leitungen
Wechselbiege-Kabelprüfmaschine
Kabelprüfmaschine für Schleppkettenanwendung
Kabelprüfmaschine - Flextest
Kabelprüfmaschine für Kupferkabel sowie für optische Fiberglaskabel
Kabelprüfmaschine mit Kabeltisch für 4 Leitungen
Kabelprüfmaschine Torsionstest
Wir und Parker-Hannifin
Applikationen
Pressen-Stanzen
Linear-Einheit
Abläng-Vorrichtung
Aerospace: Ground Support Equipment
Military: Nationale Sicherheit
Temperatur-Anzeige auf einem Turm
Fahr- und Lenkantriebe für führerlose Transportsysteme
Maschinen Retrofit
Heben und Senken
Universelle Dosiersteuerung
Clinchen (Pressverformung)
Geschwindigkeitsmessung
Elektroschrauber (mit bürstenlosem Servomotor)
Pick & Place Bestückungsautomaten
Gewindeschneiden
Männerspielzeuge - Radlader
Informationen
Über Mattke
Mitgliedschaften
ISO-Zertifikat
Veröffentlichungen
Videoarchiv
Newsletter
Newsletter Anmeldung
Archiv
Archiv bis 03.2016
Veranstaltungen
Badische Seite
Rezepte
Kunst bei Mattke
Referenzen
Technische Informationen
Wechsel- oder Gleichstrom?
Kein Trick. Reine Ingenieursleistung.
Sicherheitstechnik
Die grosse Frage: DC- oder BLDC-Motoren?
Neue internationale Wirkungsgradklassen für Motoren
Abkürzungen
Formeln
Jobs & Karriere
Downloads
Handbücher
Servoregler
Servomotoren
Software
Prospekte
Kontakt
Kontakt
Anfahrt
Vertretungen
Im Inland
Im Ausland
Login
EN
DE
Home
/
Produkte
/
Servoregler
/
Digitale Servoregler
Produktübersicht
Softwarelösungen
Servomotoren
EX / ATEX Motoren
Servoregler
Digitale Servoregler
Analoge Servoregler
Analoge Lineare Servoregler
Dezentrale Servoantriebe
Lineareinheiten + Hubzylinder
Asynchronmotoren
Frequenzumrichter
SPS /Steuerungen
Parker PAC
Getriebe
Servotechnik /Automatisierungstechnik Zubehör
Kabelprüfmaschinen
Wir und Parker-Hannifin
4Q-PWM-Servoregler mit digitalem Regelkreis
smartServo - schnell, schmal, smart
Universeller Servoregler mit Bluetooth
mehr...
4Q-PWM-Servoregler Serie MDCA bis 1 KW
Servoregler für bürstenbehaftete Servomotoren
mehr...
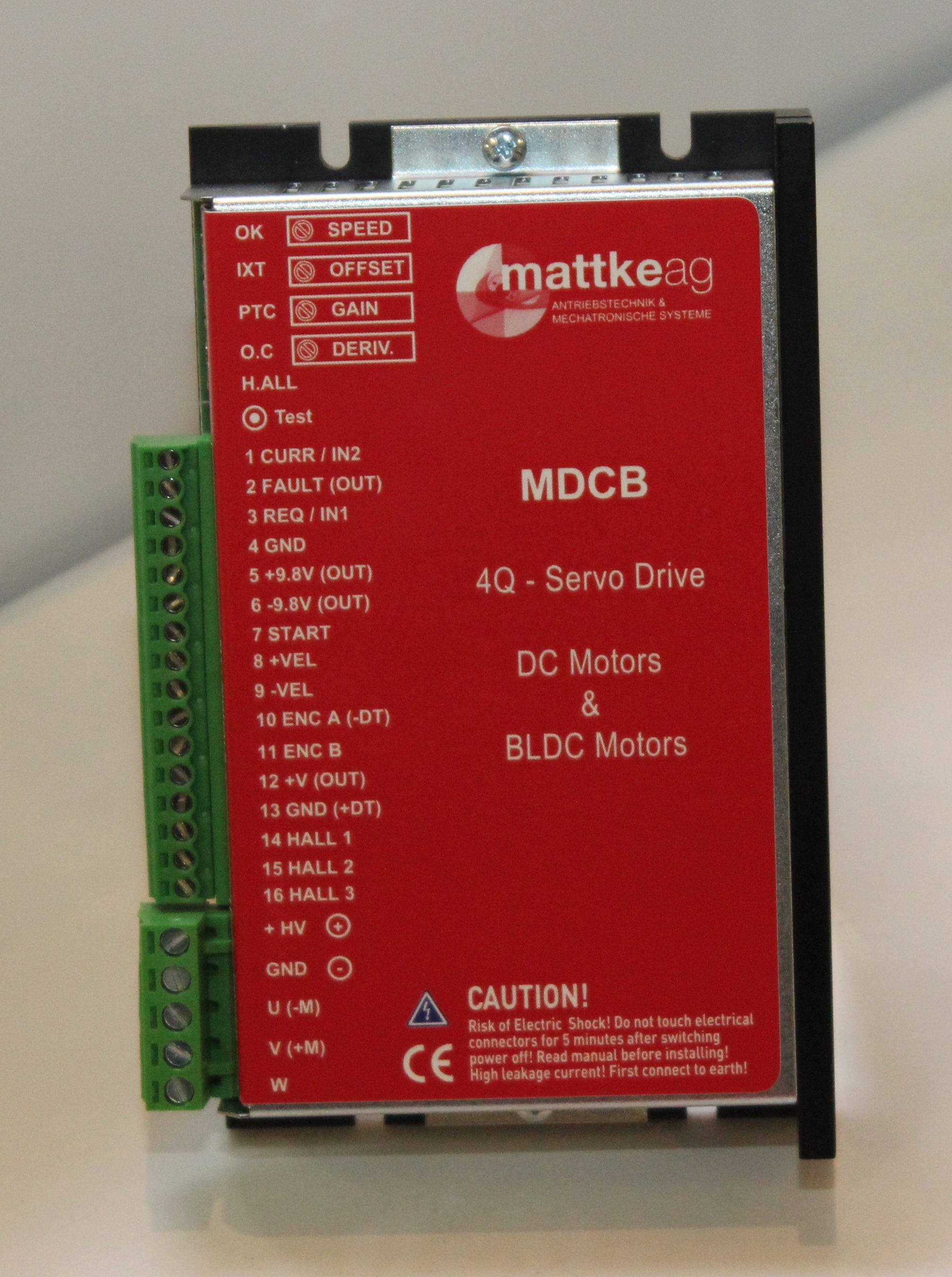
4Q-PWM-Servoregler Serie MDCB bis 1,2 KW
Servoregler für bürstenbehaftete und bürstenlose Servomotoren
mehr...
Digitale 4Q-Servoregler Serie MDR2000SE (STO) 0,5 bis 6 KVA
Universeller AC-Positionierregler mit optionalem STO für Synchron-, Asynchron-, Torque- und Linearmotoren
mehr...
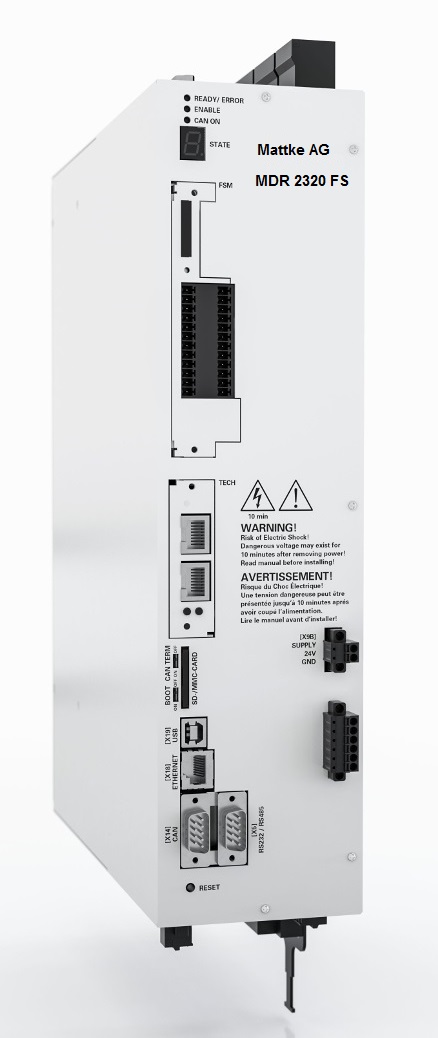
Digitale 4Q-Servoregler Serie MDR2000FS von 0,5 bis 6 KVA jetzt auch mit PROFINET!
Universeller digitaler AC-Positionierregler für Synchron-, Asynchron-, Torque- und Linearmotoren mit funktionaler Sicherheit
mehr...
Digitale Servo-Positionierregler Serie MDR2320 und MDR2340 jetzt mit Funktionaler Sicherheit
mehr...
Digitaler Servoregler MDR230/4 für einfache Positionieraufgaben
kostengünstiger Kompakt-Servoregler mit integriertem Wegeprogramm für bürstenlose Servomotoren mit Resolver
mehr...
Digitaler Servoregler MDRM230/2 für dezentrale Antriebe bis 320 VA
Servoregler-Modul zum Anbau an verschiedene Servomotoren für dezentrale Lösungen ohne Schaltschrank
mehr...
Digitale Servoregler Serie COMPAX3 bis 110 KVA
Hi-Performance-Servoregler und Positioniersteuerung für besondere Anwendungen. - Die Mattke GmbH ist offizieller Parker-EMTC -
mehr...
Stand-Alone und Mehrachs-Servosystem Serie PSD / 1, 2 oder 3 Achsen / bis 5,3 kVA
NEU - Extrem kompaktes Mehrachs-Servosystem von Parker - Die Mattke GmbH ist offizieller Parker-EMTC -
mehr...
Digitale Servoregler Serie MMC bis 150 Watt
Mini-Servoregler für DC- und BLDC- Kleinmotoren bis 24 Volt, 6A
mehr...
Digitale Servoregler Serie MC 5004 / MC 5005 / MC 5010
Neu im Programm unseres Partners Faulhaber
mehr...