Er ist intelligent: Drehzahl- oder Drehmoment- oder Positionierregelung, Punkt zu Punkt oder Bahnsteuerung, integrierte Ablaufsteuerungen sind möglich.
Als dezentraler Antrieb findet er insbesondere in Multiachs - Anwendungen seinen Einsatz, wie zum Beispiel in Verpackungs- und Textilmaschinen, Schraub- Dreh- und Wickeleinrichtungen, Handlingsystemen.
| Symbol | Einheit | Zwuckel | Zwuckel XL |
Stillstandsmoment | Mo | Nm | 0,7 Nm | 1,4 Nm |
Nennstrom | IN | A | 5 A | 8 A |
Spitzenstrom | Imay | A | 10 A | 15 A |
Nennspannng | UN | V | 48 V DC | 48 V DC |
Nennleistung | PN | W | 200 W | 400 W |
Nenndrehzahl | NN | min-1 | 3000 U/min | 3000 U/min |
Massenträgheitsmoment | JR | kg cm2 | 0,13 kgcm2 | 0,23 Kgcm2 |
Parametrierschnittstelle | | | RS232 | RS232 |
Bus | | | CAN-Open | CAN-Open |
Steckersatz Standard | | | M16 (3-Pol + 10-Pol) | M16 (3-Pol + 10-Pol) |
Analogeingänge | | | 1 (0- 10 V) | 1 (0- 10 V) |
Digitaleingänge | | | 2 (24 V) | 2 (24 V) |
Analogausgang | | | 1 Monitoring 0-3,3 V | 1 Monitoring 0-3,3 V |
Schutzart | | | IP65 | IP65 |
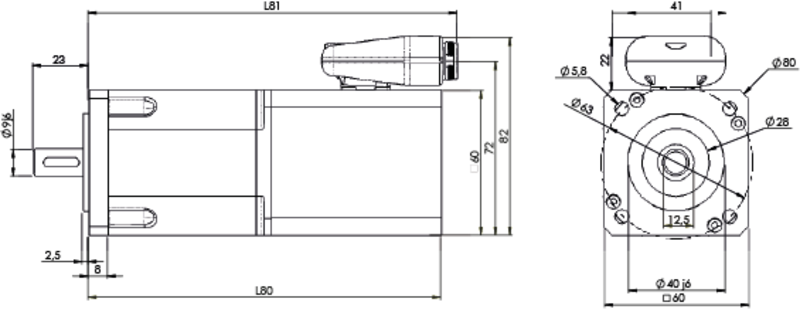
Motor Typ | Zwuckel | Zwuckel XL | |
ohne Bremse | L80 | 146,4 | 174,4 |
| L81 | 153 | 181 |
mit Bremse | L80 | 170,8 | 204,4 |
| L81 | 183 | 211 |
Fr @ 3000 Upm | 220 N | ||
Fa @ 3000 Upm | 140 N | ||
Optionen *
Flansch | 50/70 | Welle | 9 × 20 | 14 × 30 |

1 T×D CAN High
2 R×D CAN Low
3 GND RS232 **
5 analog Eingang 0 - 10 V
8 OUT / ERROR
9 DIR (Drehrichtungsumkehr) 24 VDC
10 Freigabe 24 VDC
11 analog Monitor 0 - 3,3 V
A +48 VDC
B GND
**nur auf Buchsenseite belegt
| Zwuckel / Zwuckel XL |
Lebensdauer | > 20000 h bei 40°C Umgebungstemperatur |
Umgebungstemperatur | 0°C bis 40°C (bis 50°C mit Derating) |
Sollwerteingang AIN | 0 … 10 V Analogeingang, 12 Bit Auflösung |
Logikeingang ENAB | 24 V, aktiv High, Ri=20 k? Eingang Freigabe Regler Eingang Drehrichtung |
Logikausgang OUT / ERR | 24 V / 10 mA Impuls-/Fehlerausgang Open-Collector Regler Betriebsbereit und Motor steht –> OUT high / offen Motor dreht –> Rechtecksignal mit Drehfrequenz Programmierbare Strichzahl, max. 4 kHz Strichfrequenz Fehler –> OUT low / durchgeschaltet |
Monitoreinrichtung AMON Ausgangspegel | 0 … 3.3 V Spannungsausgang, frei normierbar, z.B. Stromistwerte, Winkel elektrisch oder mechanisch, Drehzahlistwerte, Drehzahlsollwerte |
Überwachungseinrichtungen: Überspannung Zwischenkreis Unterspannung Versorgung Überstrom Zwischenkreis Kurzschluss Motor Thermoschutz Endstufe Winkelgeberfehler | >60 V <18 V Abschaltung des Logikteils Kurzschlussüberwachung Kurzschlussüberwachung 100°C Kühlwinkeltemperatur Sammelfehler |
CAN-Busanbindung Pegel Baudraten Protokoll | differentiell gem. Standard ISO/DIS 11898 125 / 250 / 500 / 1024 kBit/s CANopen gem. DSP402 / DS301 |
Terminal-Schnittstelle RS232 | RxD / TxD gem. RS232 Spezifikation, max. 115200 Bit/s |